Introduction
According to some studies, electric motors are responsible for about 45% of the total consumption of electric energy [1]. If we focus the analysis on one the most energy-eating ambits, the industrial one, the percentage ascribable to motors rises to around two thirds. Considering that several of the machines currently in operation are obsolete, it is clear that the replacement with new more efficient motors would lead to important advantages for the environment and the resource exploitation, as well as in manufacturing costs and then in competitiveness. They estimate for instance that, in the only Europe, the use of forefront drive technologies instead of obsolete ones can determine a reduction of yearly consumptions by 135 TWh and CO2 emissions by 69 million tons [2]. Evaluating the entire life cycle of a motor in constant operation, we can verify that the spending connected with the energy consumption represents by far the major percentage in the total cost (even more than 90%, [3]).
For these reasons, in the European Union, as well as in the United States, in China and in other Countries, are in force regulatory plans providing for the mandatory compliance with gradually increasing efficiency requisites for new installations. According to the Minimum Energy Performance Standard (MEPS), for instance, the motors released on the EU market since January 2017 in the power range from 0.75 to 375 kW must have IE3 efficiency level or IE2 efficiency level if powered by inverter (see Fig. 1), with very few exceptions.
With the technology most diffused among motors today, the asynchronous motor one (or Induction Motor, IM), the improvements demanded in the future will not be possible, at least at reasonable costs, and for all power ranges. These aspects, combined with other factors such as the growing awareness of the importance of decreasing energy consumptions, are leading to the adoption of motors scarcely spread until now, such as Permanent Magnet Synchronous Motors, PMSM, and Synchronous Reluctance Motors, SynRM, [4][5]. This class of motors, in fact, features intrinsic characteristics that allow a notable improvement of the efficiency and of the power density, in particular very low rotor losses.
Even if already in the Eighties “brushless” servomotors (i.e. Surface Mount‑PMSM, SM‑PMSM) have been used in industrial automation, thanks to their excellent controllability and high dynamics, the application of electric synchronous machines with unwound rotor has remained limited to particular applications for a long time. Over the last few years, on the contrary, thanks to the above-mentioned factors concerning efficiency and the decrease of production costs of motors and inverters, the adoption of this type of motors is notably spreading.
Classification of AC motors
The majority of alternate current (AC) motors is three-phase, even if there are some exceptions like in the case of single-phase and stepping motors (that are generally two-phase). The most important distinction is generally between synchronous and asynchronous machines, difference based on the fact that the mechanical rotation speed, at steady state, is strictly connected (synchrony) or not with the rotation frequency of the stator magnetic field. This difference is concretely mirrored in the fact that, to generate torque in the asynchronous machine, the presence of induced currents in the rotor is necessary, whereas it is not needed (and, on the contrary, undesired) in synchronous machines.
Synchronous machines are characterized by the fact that the magnetic rotor field is geometrically bound to the mechanical position of the rotor itself. The rotor field can be generated by a current that runs through a winding (synchronous motors with wound rotor), by permanent magnets (permanent magnet synchronous) or by the stator current itself, modulated by the magnetic anisotropy of the rotor (synchronous reluctance).
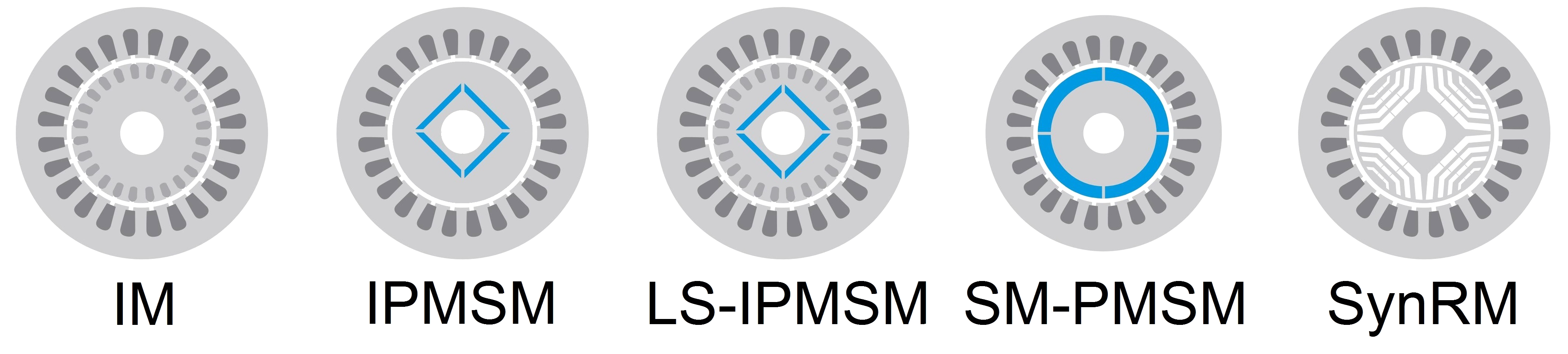
Structurally, both the rotor and the stator of radial flow machines (that are by far the majority) are manufactured by stacking ferromagnetic laminations opportunely blanked, solution aimed at hindering the parasite currents. The rotor is generally cylindrical and can be equipped with spaces to house permanent magnets or conductive material. In Fig. 2 are schematized the sections of the various types of motors just listed (with the exception of the synchronous one with wound rotor). The darkest areas (slots) correspond to windings, permanent magnets are indicated in blue whereas the grey zone of the section represents the ferromagnetic material (lamination). As you can see, the difference among the various motor types is concentrated in the rotor, whereas the stator (unless particular cases) can be implemented in the same way. In the asynchronous motor, the rotor slots are filled by a fusion, which constitutes the so-called “squirrel cage”, generally made of aluminium or, recently, of copper (with higher costs, in order to reduce losses). In permanent magnet motors, instead, magnets can be introduced into apposite carvings inside the rotor structure (IPMSM and line-start IPMSM) or applied on the surface in case of SM‑PMSM. In the SynRM case, instead, the carvings inside the rotor are simply void and called “flow barriers”, since they perform the function of increasing the reluctance (i.e. the capability of opposing the magnetic flow passage) along some directions, favouring instead others (i.e. the paths more characterized by the presence of iron).
In their turn, synchronous motors can be subdivided according to the torque production principle. In surface permanent magnet motors, the torque production occurs only thanks to the interaction between the field generated by permanent magnets and the stator current. Vice versa, in reluctance motors, it is exploited the system tendency to minimize the reluctance of magnetic paths, if subjected to excitation. In internal magnet motors (IPMSM), both principles are generally exploited.
In the production of permanent magnets, particular materials are used, to achieve high induction values and to prevent the risk of demagnetization (generally linked with high temperatures or high magnetic field). The most used materials are neodymium -iron-boron, samarium -cobalt and aluminium-nickel-cobalt. Especially in the SM‑PMSM case, the quantity of active magnetic material is high, with a strong weight of raw materials in the total cost. This condition is worsened by the strong variability of the price of the so-called “rare earths” [7], elements used in small quantities but very important for the magnet quality. Apart from cost and availability problems, these materials arouse also important environmental, political and ethical issues regarding their extraction, trade and disposal. For these reasons, huge resources are invested in the research and development of different materials and, especially, in the project of motors that minimize the use of permanent magnets, [8], or that allow the use of the so-called ferrites, i.e. ceramic magnetic materials that use less problematic materials.
Power supply through inverter and control
A negative aspect of synchronous motors derives from the impossibility of powering them simply connecting them with the net (Direct On‑Line, DOL), as it instead occurs for asynchronous ones. For the operation of permanent magnet synchronous or reluctance motors, the presence of a “drive” is therefore necessary, i.e. the whole consisting of the real inverter (a pure electronic power actuator), of the electronic controller and the algorithms implemented in it. The control algorithm, implemented on a digital device, is updated with frequencies in the order of 10,000 times per second. Despite the additional cost, it is worth considering the possibility of varying the operation conditions, in particular speed, brings important advantages in several applications (especially pumps and fans, where it allows notable energy savings).
Controlling the inverter in PWM (Pulse Width Modulation) it is possible to generate efficiently a tern of voltages that are characterized by amplitude, frequency and arbitrary phases. Since in synchronous motors the torque depends on the current amplitude and on its phase relation with the magnetic axis of the rotor, in control algorithms the Park coordinate transformation is generally used, thus bringing the three-phase system to a reference system integral with the rotor axis (Fig. 6). The knowledge of the rotor position is then essential for the synchronous motor control. In some applications, where no particular control performances are required, it is possible to eliminate the mechanical position sensor, owing to the cost and the reliability decrease stemming from it. “Sensorless” control techniques have in fact been developed, where the rotor position is estimated exploiting current and voltage measurements (inside the inverter and anyway necessary) and the motor model. Sensorless techniques for synchronous motors, developed since the Nineties, initially found application in some specific cases only. In the products currently called “inverters”, i.e. those drives for generic use, the first algorithms of this type were introduced in the late 2000s, to become then an almost standard equipment in the last years. Unfortunately, these solutions are still scarcely known by automation operators, even if their validity has been demonstrated, especially in common applications like pumps and fans.
Since the data supplied by the motor manufacturer are often insufficient for the calibration of all parameters of the control algorithm, “self‑commissioning” methods have been developed, in other words commissioning with the operator’s minimum intervention. The first step is the automatic identification of parameters (“self‑identification”), with methods fulfilled by the drive itself, to proceed then to the real calibration, i.e. the choice of the values for control parameters. Both industry and the academic world actively research on these aspects, with very interesting proposals also in Italian ambit, [10]-[14].
Structural details
As already said, the biggest difference among the various types of AC motors mainly resides in the rotor structure. There are in fact various cases of synchronous motors designed to keep the other parts almost unchanged compared to a corresponding asynchronous machine (eventually changing the winding turns). This kind of approach has spread in the last few years, with the aim of satisfying generic applications, precisely as substitution of the asynchronous motor. Besides the evident advantages in manufacturing costs, the use of equivalent parts in terms of overall dimensions, supports and external fixing points has allowed adopting these motors without modifying the remaining mechanics. Concerning this, innovative examples are represented by Italian companies’ products, like the series of internal permanent magnet synchronous motors and reluctance motors illustrated in Fig. 5.
In synchronous motors, especially in permanent magnet ones, it is possible to implement a high number of poles, with a speed reduction with the same voltage and a torque increase with the same current. This degree of freedom in the project can be compared, by analogy, to the use of a mechanical speed reducer and therefore, in some applications, it allows using a direct‑drive connection, with some advantages in terms of efficiency, overall dimensions, cost, reliability and control precision. This solution has been adopted for some years in industrial machines (for instance, in the production of paper, [14]), in the civil lifting sector (lifts), in the air treatment (cooling tower fans, [15]) and in some household appliances (in particular washing machines).
In the project considered in [15], the stator pack (laminations) has been used as structural element, without the addition of an external case. Fig. 6 reports also the design of a stator lamination, where is visible the external wing for the heat dissipation. Thanks to the overall dimensions limited in height, this motor is mounted at the base of the cooling tower, in axis with the fan, thus avoiding the right-angled transmission and the speed reduction, which are instead necessary in the traditional configuration (with asynchronous motor).
Applications
The first applications in the civil sector of permanent magnet synchronous motors include conditioning systems, due to the importance that energy consumption holds in that case. In the refrigeration as well (both industrial and domestic), the adoption of synchronous motors has gradually grown. Besides, a particular case is represented by circulation pumps for heating plants that, due to efficiency reasons, nowadays are almost totally based on permanent magnet synchronous motors in sensorless control.
Among household appliances, in washing machines the use of these motor types has become common in the last few years. The use of synchronous motors instead of asynchronous or universal (with brushes) has permitted on one hand the reduction of overall dimensions and of the quantity of used material, on the other hand a better controllability, also linked with the adoption of solutions such as the mechanical direct-drive connection. In the latter case, due to overall dimension constraints and torque requisites, the rotor is usually external and the entire motor is flat and with big diameter (Fig. 7). A detail of the production of this type of machines, shared also by other particular applications, is the winding on the tooth (a distinct winding for each stator tooth). In this type, idle copper parts are reduced but it becomes more difficult to design machines with low torque ripple. The direct coupling provides advantages also from the point of view of the overall operation, facilitating the load identification in the tank and its arrangement, in addition to the speed control.
Due to the particular working cycle of washing machines, which includes the spin-drying, the operation at high speed (exceeding the nominal) is important. This modality is called “defluxing”, because, being the voltage proportional to the flow and to the speed, the overall flow is reduced through an opportune control, to allow the operation at higher speeds and fixed voltage. In this case, internal permanent magnet synchronous motors are the main candidates, since their available torque does not drop suddenly beyond the nominal speed.
An ambit where synchronous motors have become highly present are lifts, especially of big size. In this case, too, specific solutions have been implemented, like the one in Fig. 8, allowing the direct load motion (gearless). In this case, it is an axial-flow motor, i.e. the gap between stator and rotor (magnetic gap) is crossed by field lines that are parallel to the axis.
Other specific application fields concern renewable sources (for instance wind power) and avionics, where they pursue the target of “More Electric Aircraft” (replacement of hydraulic or pneumatic actuators). The use of high-efficiency and high-density motors is also spreading in traction, including the road ambit (from bicycles to heavy vehicles and operating machines), the railway/tramway sector and the industrial one (forklifts and similar).

Bibliography
- Wilde, C. U. Brunner,”Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems”, International Energy Agency, Working paper, 2011.
- “Electric Motors and Variable Speed Drives – Standards and legal requirements for the energy efficiency of low-voltage three-phase motors”, ZVEI – Zentralverband Elektrotechnik- und Elektronikindustrie e.V., Division Automation – Electric Drive Systems, Frankfurt, December 2010, 2nd Edition.
- “Boosting industrial profitability with energy efficient drives and motors”, ABB brochure, 2016
- Vagati, “The synchronous reluctance solution: a new alternative in AC drives,” 20th International Conference on Industrial Electronics, Control and Instrumentation, 1994. IECON ’94., Bologna, 1994, pp. 1-13 vol.1.
- Lipo, T. A., “Synchronous reluctance machines – a viable alternative for AC drives.”, Wisconsin Electric Machines and Power Electronics Consortium, Research report, 1991.
- “Low voltage Process performance motors according to EU MEPS”, ABB catalog, October 2014
- “Rare Earths”, S. Geological Survey, Mineral Commodity Summaries, January 2016.
- Guglielmi, B. Boazzo, E. Armando, G. Pellegrino and A. Vagati, “Magnet minimization in IPM-PMASR motor design for wide speed range application,” 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, 2011, pp. 4201-4207.
- “Motor technologies for higher efficiency in applications – An overview of trends and applications”, Danfoss Power Electronics – Danfoss VLT drives PE-MSMBM, November 2014.
- Bedetti, S. Calligaro; R. Petrella, “Stand-Still Self-Identification of Flux Characteristics for Synchronous Reluctance Machines Using Novel Saturation Approximating Function and Multiple Linear Regression,” in IEEE Transactions on Industry Applications, vol. 52, no. 4, pp. 3083-3092, July-Aug. 2016.
- Bedetti, S. Calligaro; R. Petrella, “Self-commissioning of inverter dead-time compensation by multiple linear regression based on a physical model,” in 2014 IEEE Energy Conversion Congress and Exposition (ECCE), vol., no., pp.242-249, 14-18 Sept. 2014.
- Bedetti, S. Calligaro; R. Petrella, “Analytical design of flux-weakening voltage regulation loop in IPMSM drives,” in 2015 IEEE Energy Conversion Congress and Exposition (ECCE), vol., no., pp.6145-6152, 20-24 Sept. 2015.
- Bedetti, S. Calligaro; R. Petrella, “Design Issues and Estimation Errors Analysis of Back-EMF-Based Position and Speed Observer for SPM Synchronous Motors,” in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol.2, no.2, pp.159-170, June 2014.
- A. Odhano, P. Giangrande, R. I. Bojoi and C. Gerada, “Self-Commissioning of Interior Permanent- Magnet Synchronous Motor Drives With High-Frequency Current Injection,” in IEEE Transactions on Industry Applications, vol. 50, no. 5, pp. 3295-3303, Sept.-Oct. 2014.
- Welin, C.-J. Friman, “New Direct Drive system opens a new era for paper machines”, Paper and Timber, Vol.83/No. 5, 2001.
- McElveen, K. Lyles, B. Martin and W. Wasserman, “Reliability of Cooling Tower Drives: Improving Efficiency with New Motor Technology,” in IEEE Industry Applications Magazine, vol. 18, no. 6, pp. 12-19, Nov.-Dec. 2012.



{kind=link}